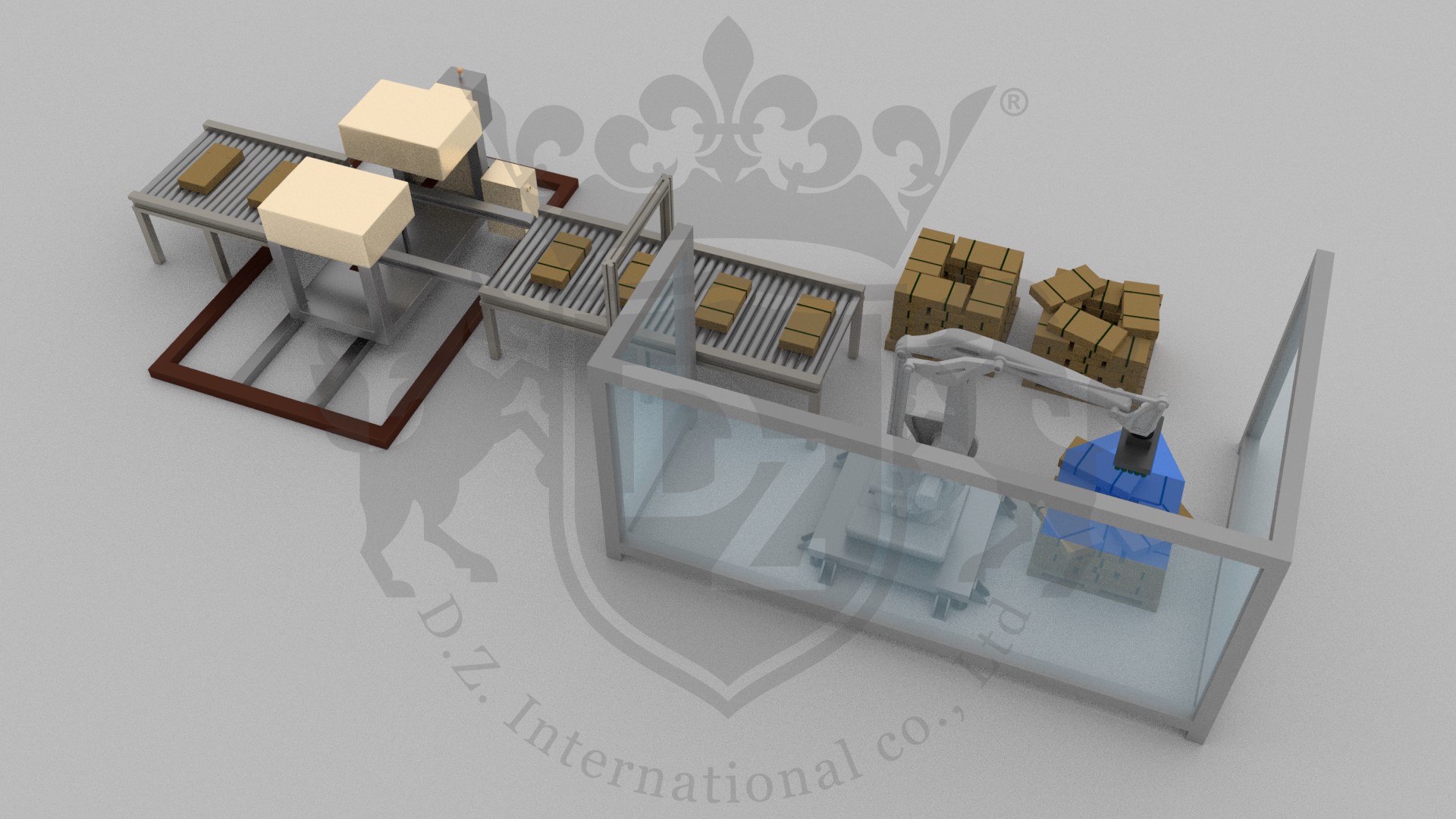
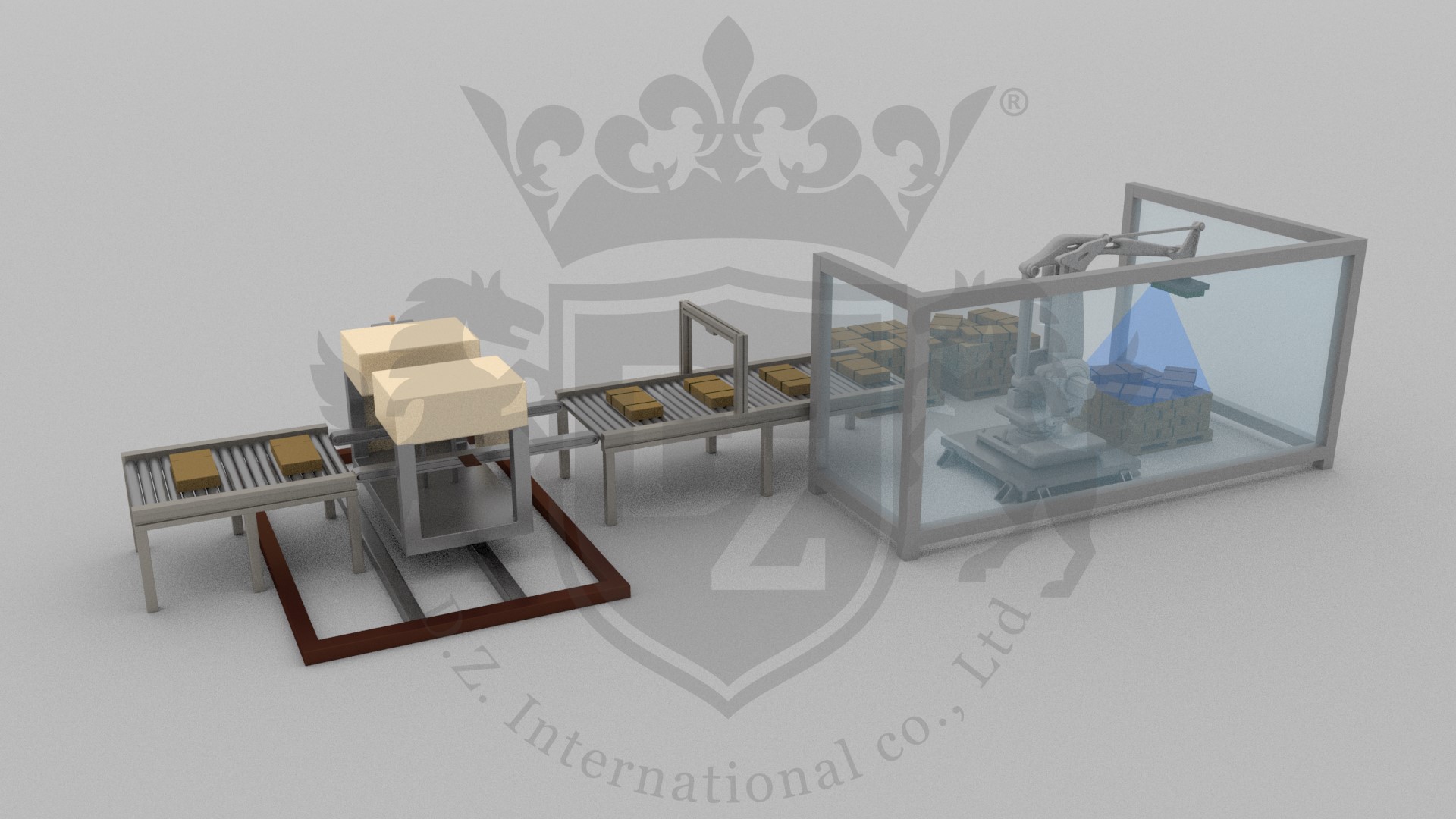
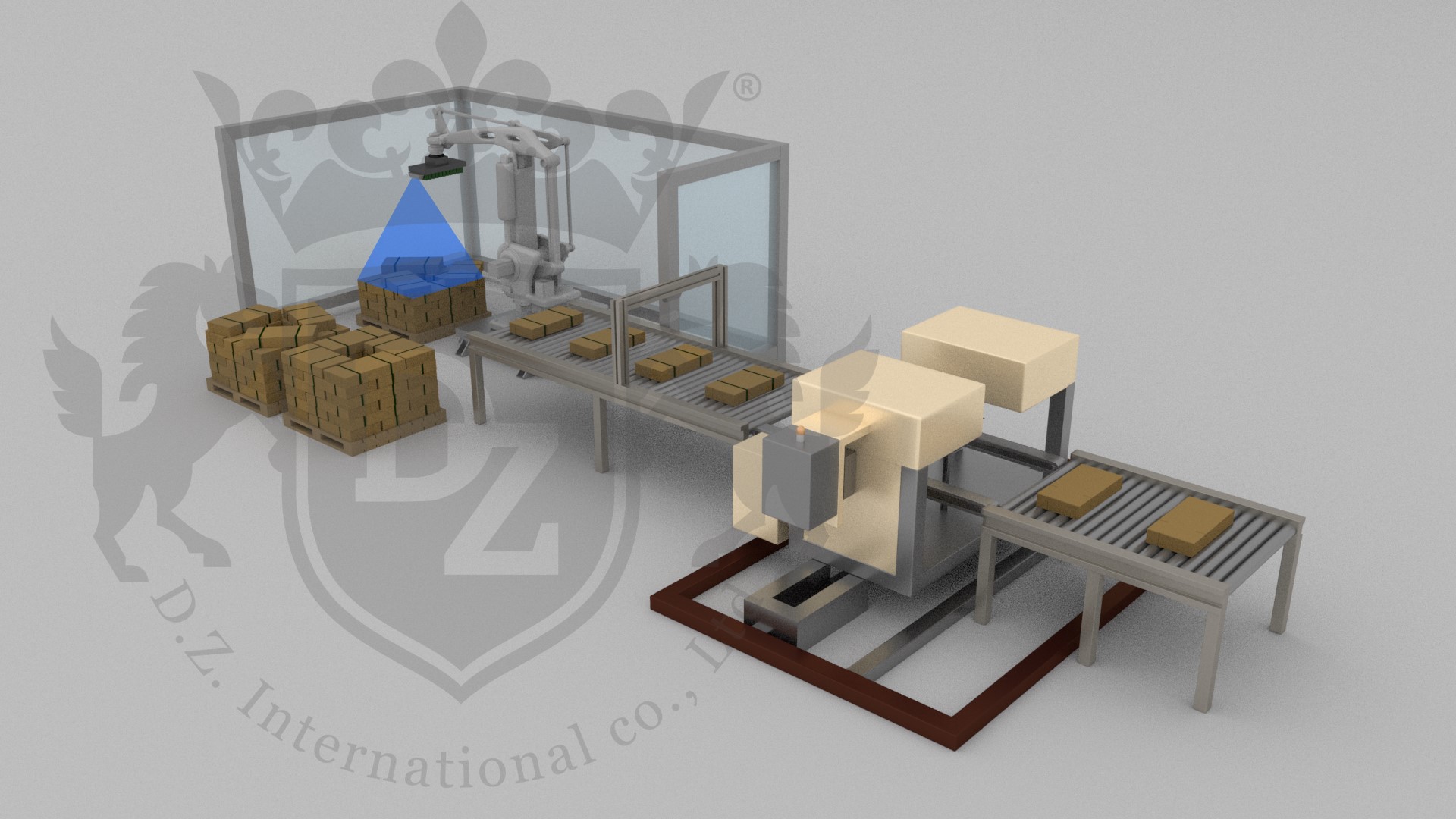
當拆棧進行時,棧板上貨物高度、大小、數量都是未知情況,因此拆棧需要透過視覺和距離輔助,再藉由這些資訊使機械手臂進行拆棧作業。
拆棧需要機械手臂和視覺的整合,相較其他應用有許多困難點,我們提供手臂視覺整合系統(PESI)方案,為客戶完成拆棧自動化,以下統整拆棧困難點及我們的解決方案:
|
|
拆棧困難點
|
解決方案
|
|
視覺系統
|
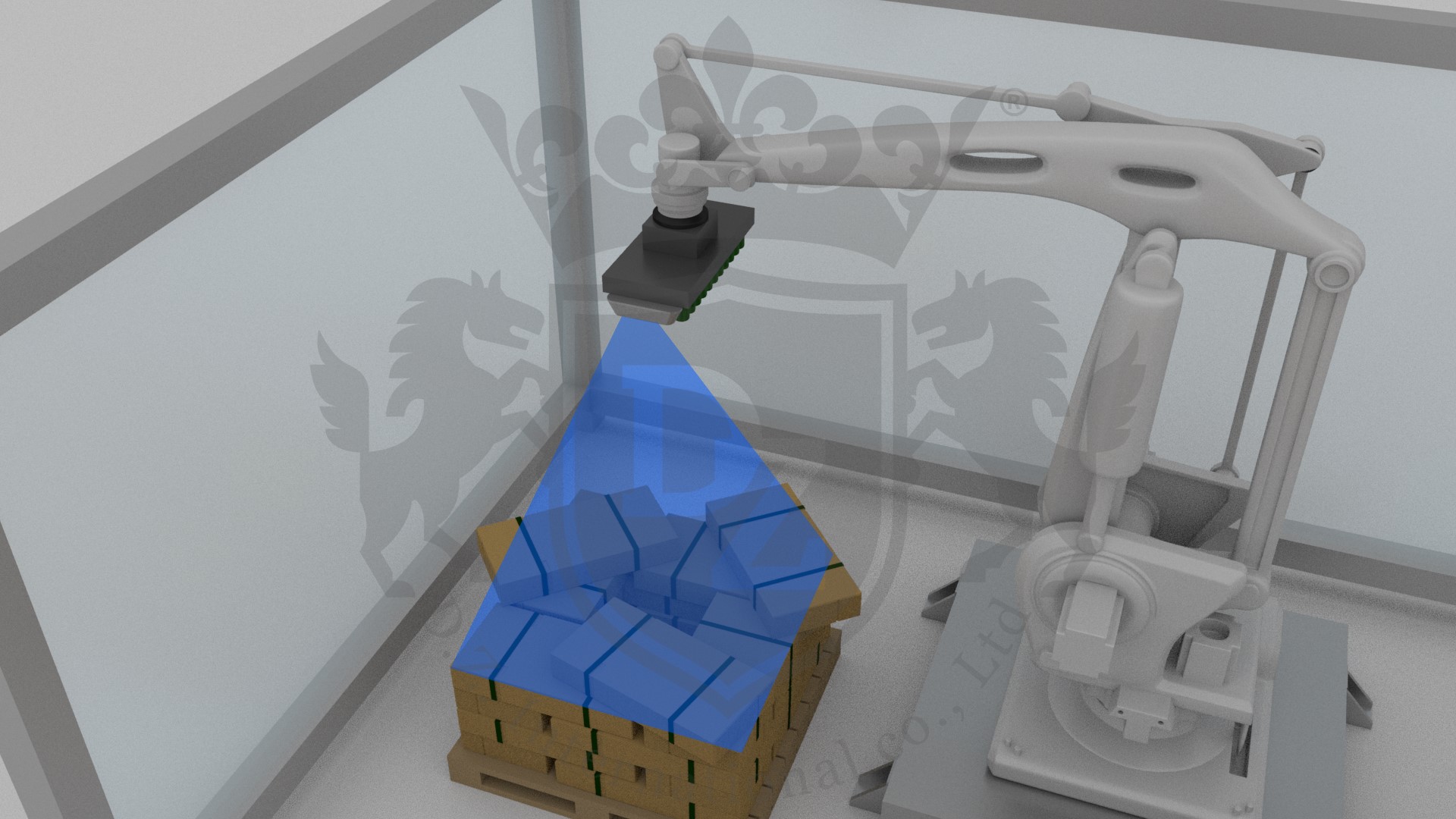
拆棧需要使用3D視覺,透過影像運算處理得到貨物的高度及深度,機械手臂才能進行拆棧。
|
視覺影像處理系統(DAVS)提供圖形化介面,簡單設定即可完成影像處理
|
|
機械手臂
|
使用教導器操控機械手臂需逐點進行規劃,耗時費工
|
手臂應用編輯系統(RAE)提供搖桿操控,可快速逐點設置,省時省力
|
|
產線換線
|
產線換線困難,需耗費大量時間重新規劃視覺及機械手臂路徑
|
PESI系統模組化功能,簡單設定即可使用,且因應各種機械手臂視覺情況
|
|
開發團隊
|
需受各種專業訓練
|
PESI系統擁有圖形化介面、模組化功能降低開發人員門檻
|
PESI系統採用圖形化介面,降低操作人員門檻,在拆棧應用中,只需規劃好現場拆棧場域,透過PESI系統設定,即可快速完成拆棧自動化,大幅降低開發時耗費的時間成本。