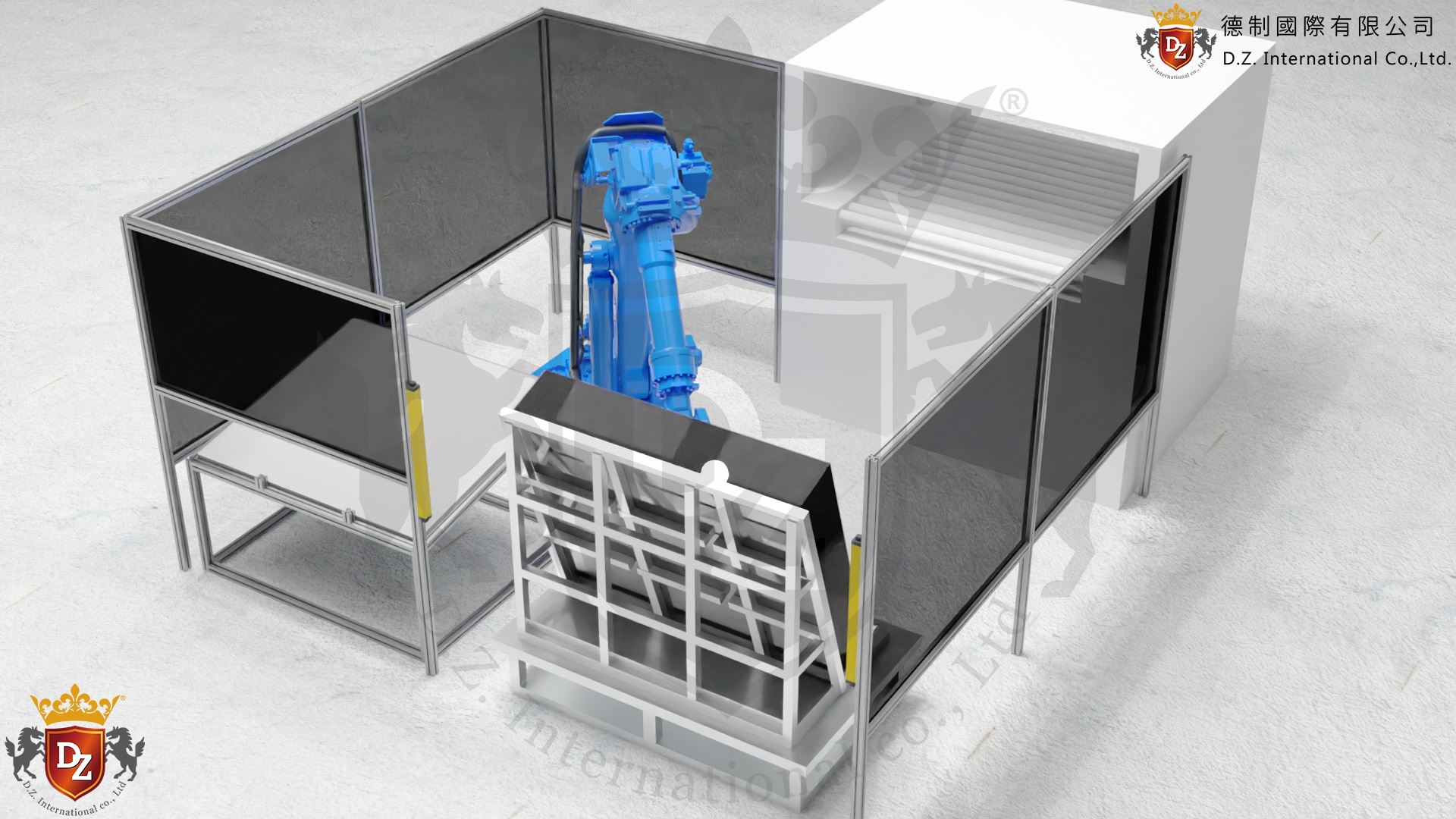


此案例要將玻璃基板放置清洗台(機械手臂左方白色機台),玻璃基板疊放置於鐵棧板(機械手臂指向區域),因避免刮傷與摩擦,玻璃基板之間會有紙張作為間隔,所以機械手臂會先將紙張吸取置存放區(手臂右側),再去吸取玻璃基板至清洗台。
較為困難的點是一般取放與搬運無正反面需要考慮,而玻璃基板的外側與吸盤定會接觸,所以需要翻轉另一面進行上料,這樣的動作對於手臂需要的移動範圍較大,又處於無塵室內地板的承重有限以及室內高度較為狹小,所以需要經過多次模擬不同手臂確認payload、工作距離,從而挑選出適當的手臂。
除了手臂的選擇,夾具的設計也非常重要,此案例中的玻璃基板面積大且薄,吸起時玻璃會有饒度產生,所以吸盤的分布與吸力都是需要考量的點,也需要注意吸具是否會與周邊的設備干涉。因為饒度的考量,需要吸在玻璃基板較靠近邊緣處,要放置上輸送帶時無法接觸到輸送帶,所以在吸具上面設計了類似輸送帶的滾輪裝置,到達定位後關閉吸盤開啟滾輪將玻璃基板送入。而另一個需要注意的部分為紙張的吸取,因為紙張在斜面時會有垂落的風險,一組吸盤其中只要有一個沒有吸到就會導致破真空,所以需要將吸盤進行分組,確保至少會有一組吸盤將紙張吸起。