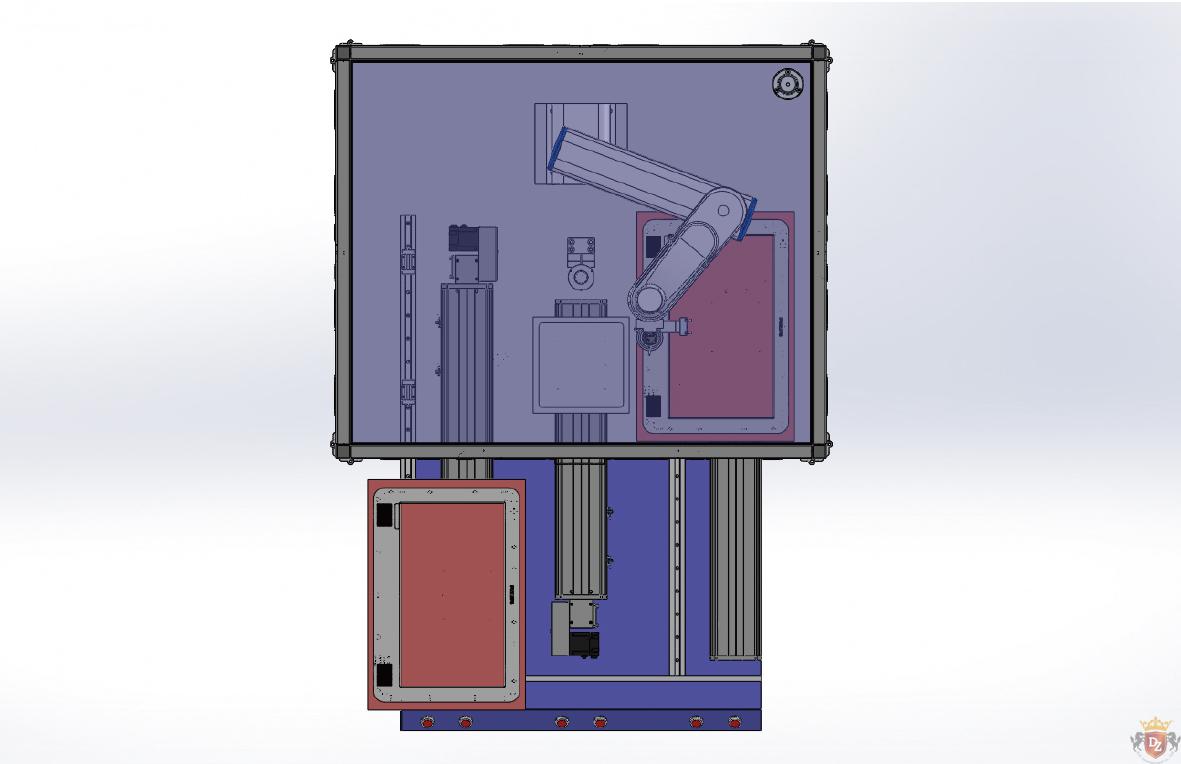
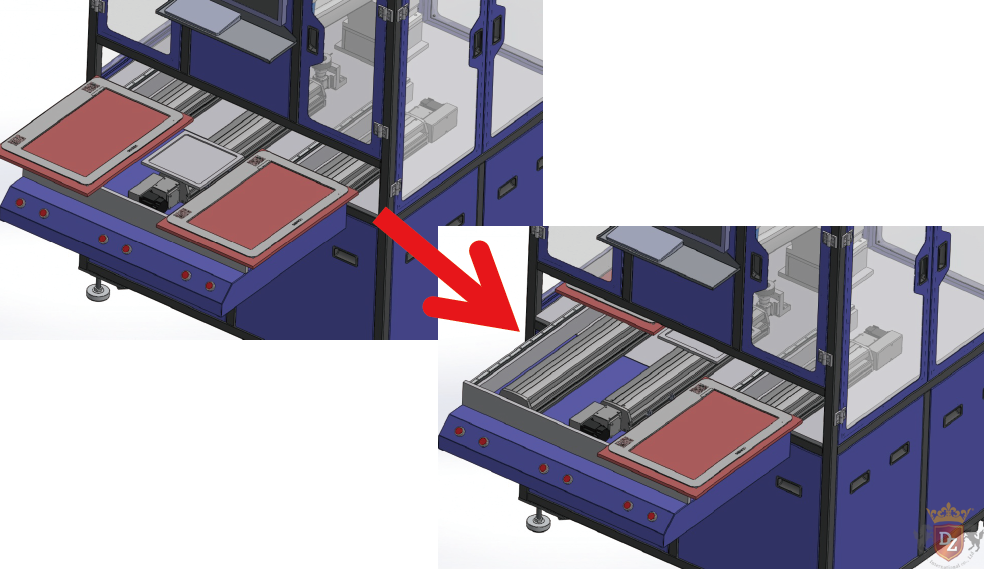
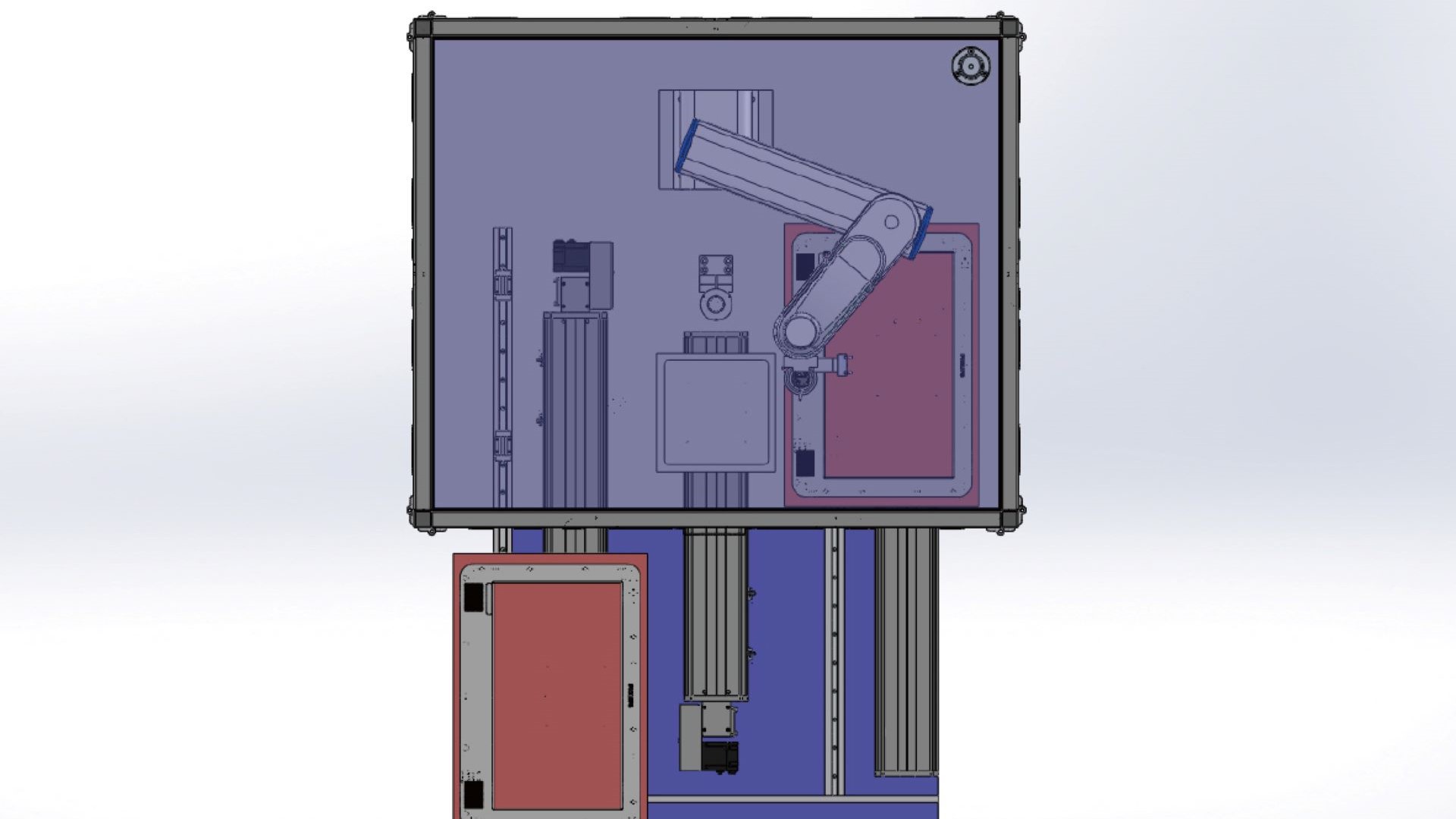
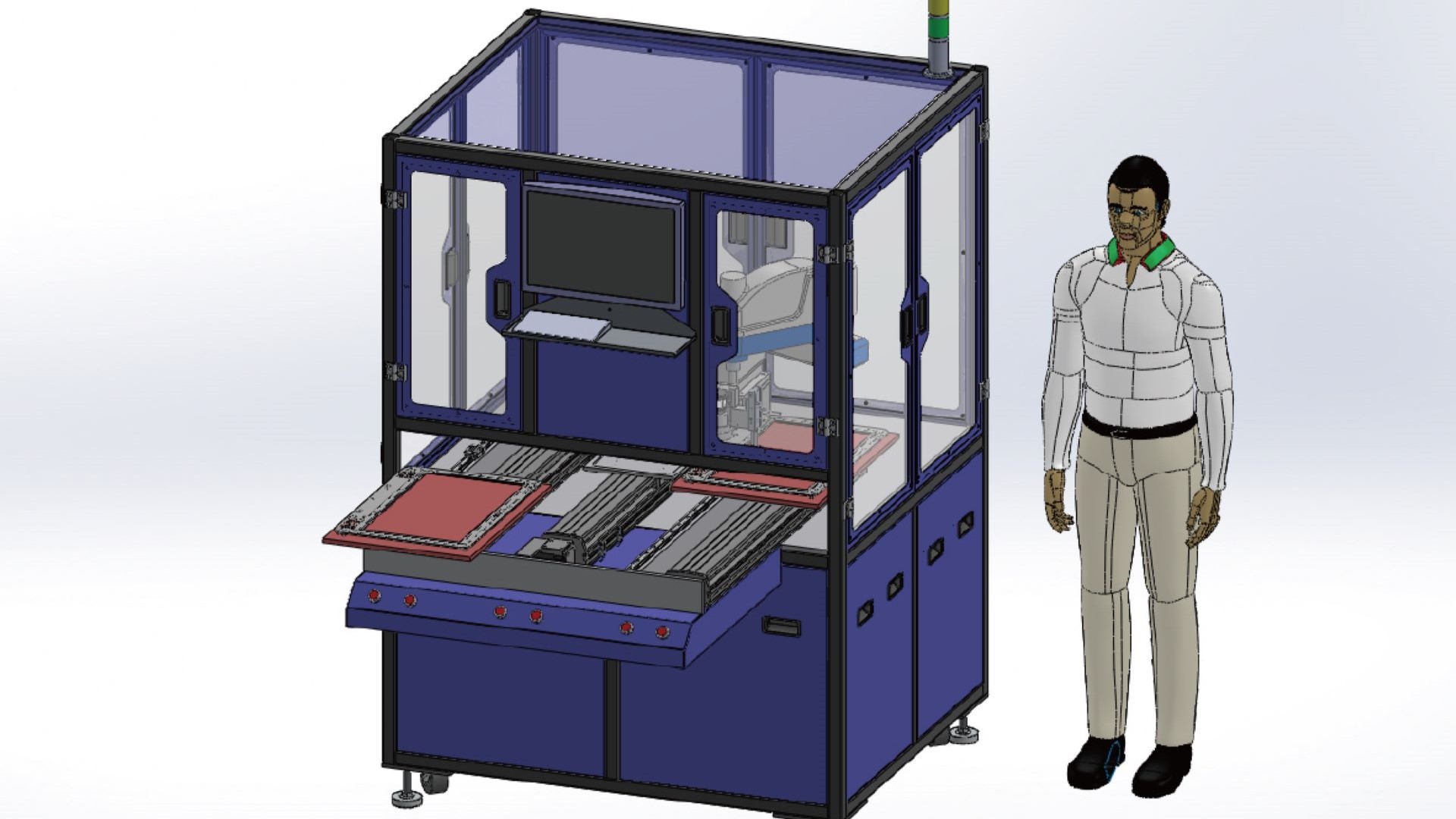
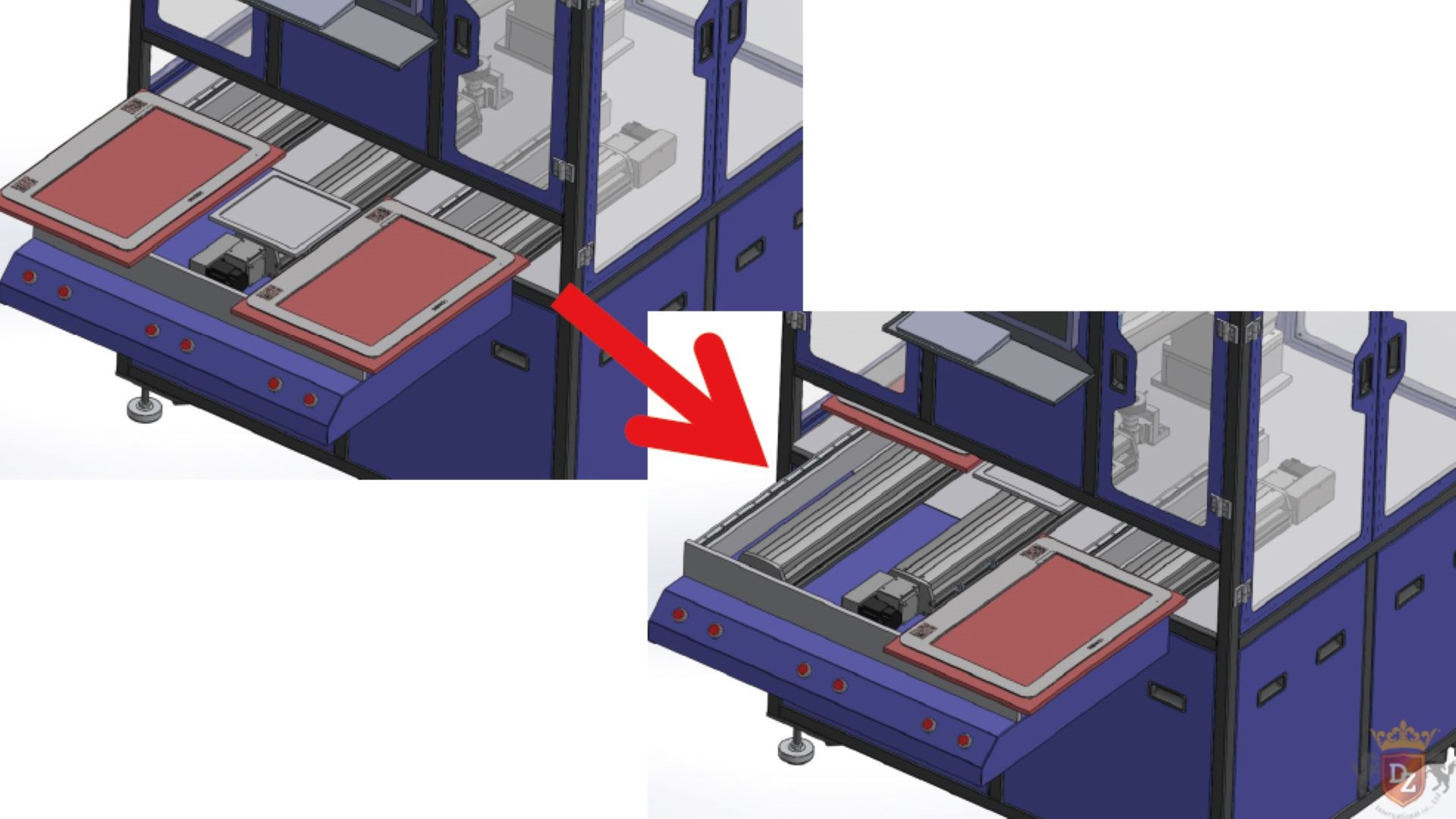
此案例為塑膠工件的貼紙貼合自動化,設計兩組工件放置台讓手臂交錯運作,一組進入貼貼紙的過程中,另一組可讓作業員上下料,不僅作業速度加快一倍,也提升貼合的準確度。
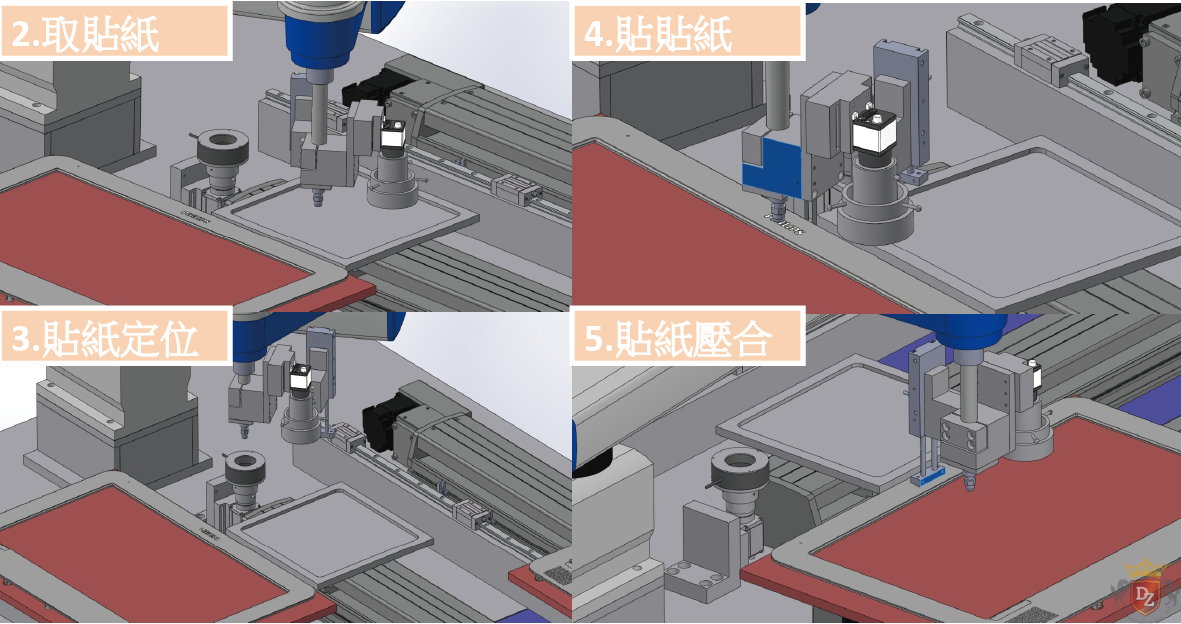
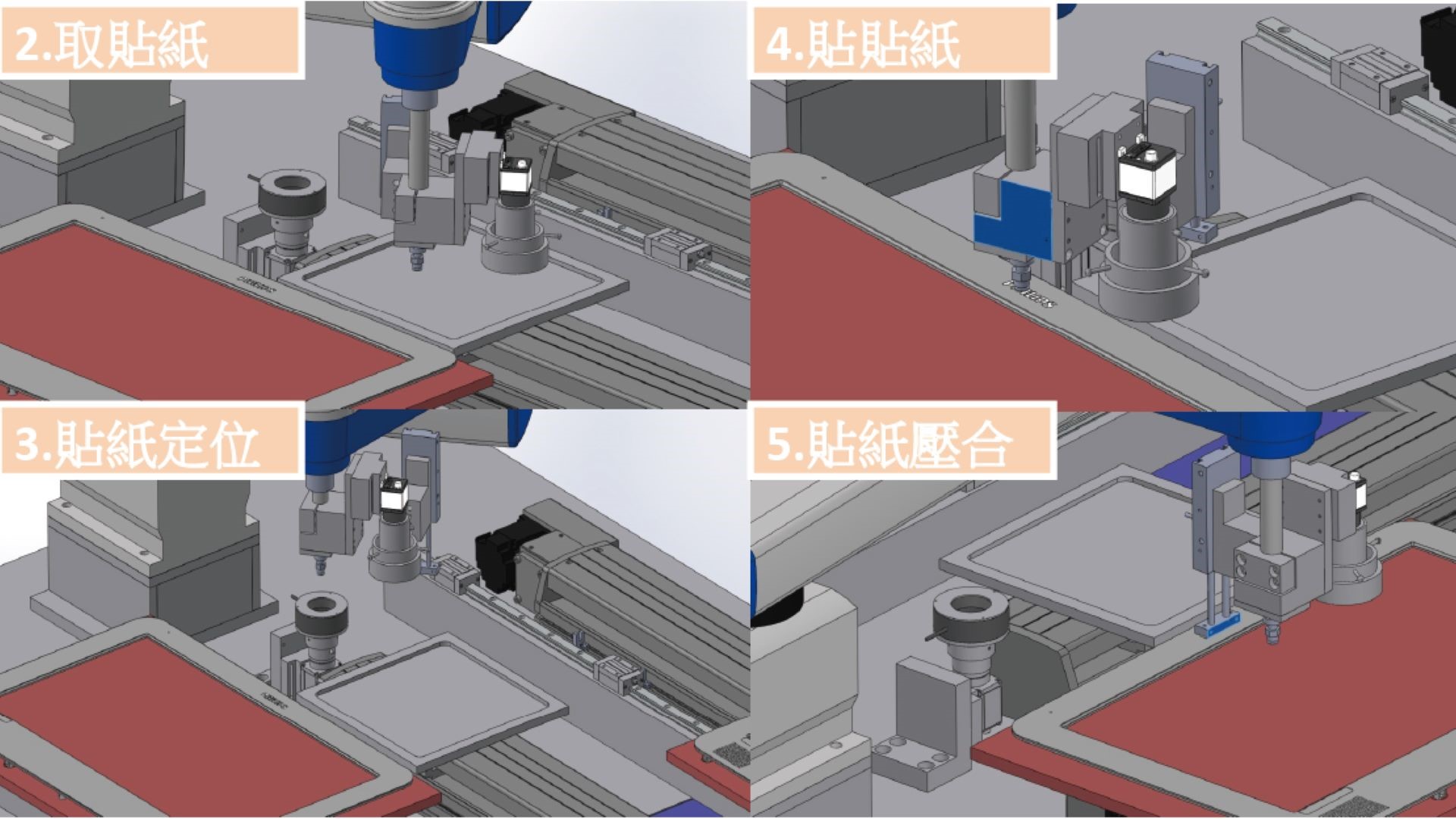
此案例另一個特點為機械手臂的吸具,會先由手臂上的視覺系統進行貼紙定位,吸盤吸取貼紙後會再進行二次定位,確認吸盤上貼紙的位置與偏移,藉此微調貼紙貼合的位置,最後使用氣壓缸將貼紙壓合。